最近の自動走行車両では,LiDAR(Light Detection And Ranging)と呼ばれるレーザ・スキャナ装置が,周囲の状況を検出するために使われています.自動走行などで使用されるLiDARは3次元の情報を取得することができる3D LiDARです.
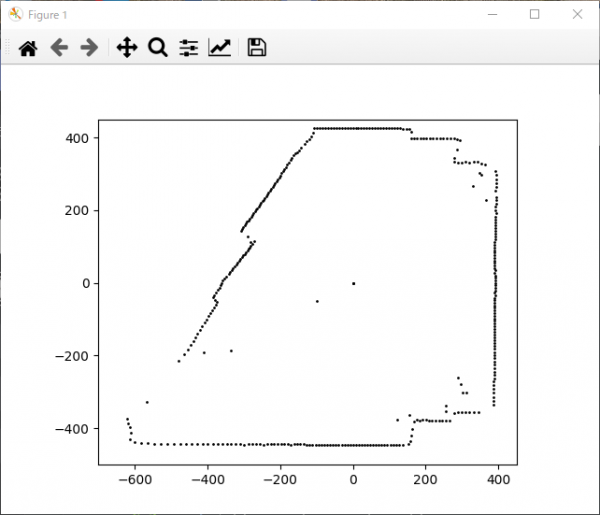
この記事では,2次元の2D LiDARを使い,処理する情報量を減らして2次元マッピングを試します.
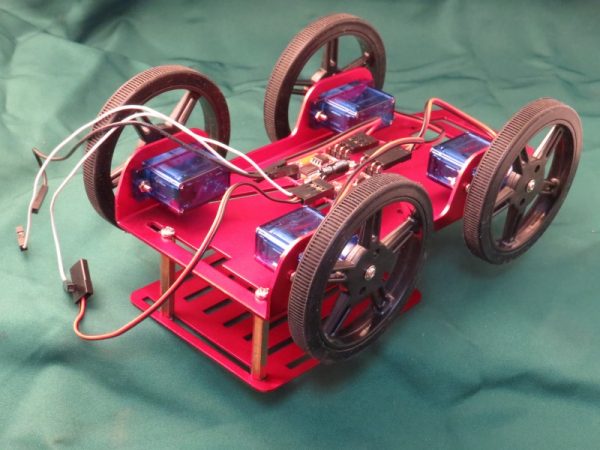
本記事では,安価で入手可能なYDLiDAR X4 と,こちらも手軽に試すことのできる,秋月電子通商の4WD サーボ・モータ車 FT-MC004とを組み合わせ,Wi-Fi経由で手動コントールしながら周囲の情報を取得する環境を構築します.
取得する2 次元図は,ROS2 のPython ライブラリを使ったスクリプトでリアルタイムにパソコンから確認することができます.
ROS(Robot Operating System)は,ロボット用のソフトウェア・プラットフォームです.
学術研究目的で開発が始まり,産業用途にも利用範囲が広がってきています.ROS2は,ROSの次世代バージョンとなります.記事ではROS2のライブラリを利用します.